 EN
EN
 AR
AR
 CS
CS
 FR
FR
 DE
DE
 IT
IT
 JA
JA
 KO
KO
 PT
PT
 RU
RU
 ES
ES
 ID
ID
 VI
VI
 TH
TH
 TR
TR
 MS
MS


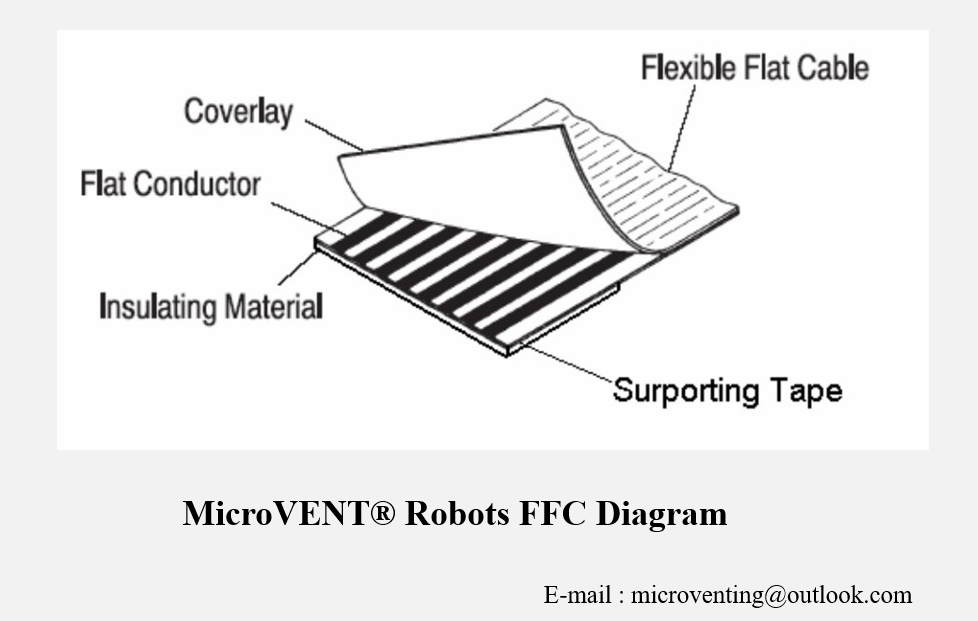
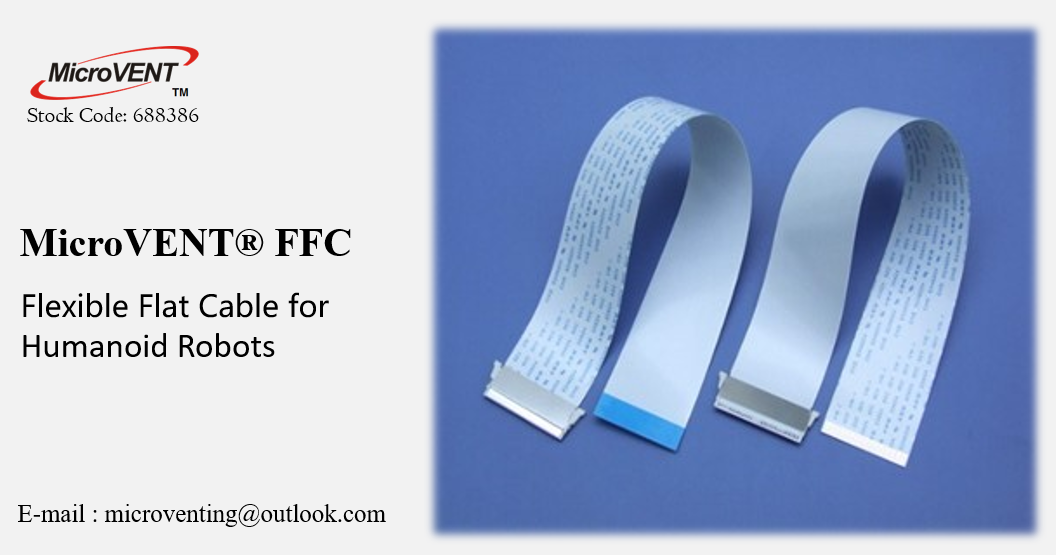
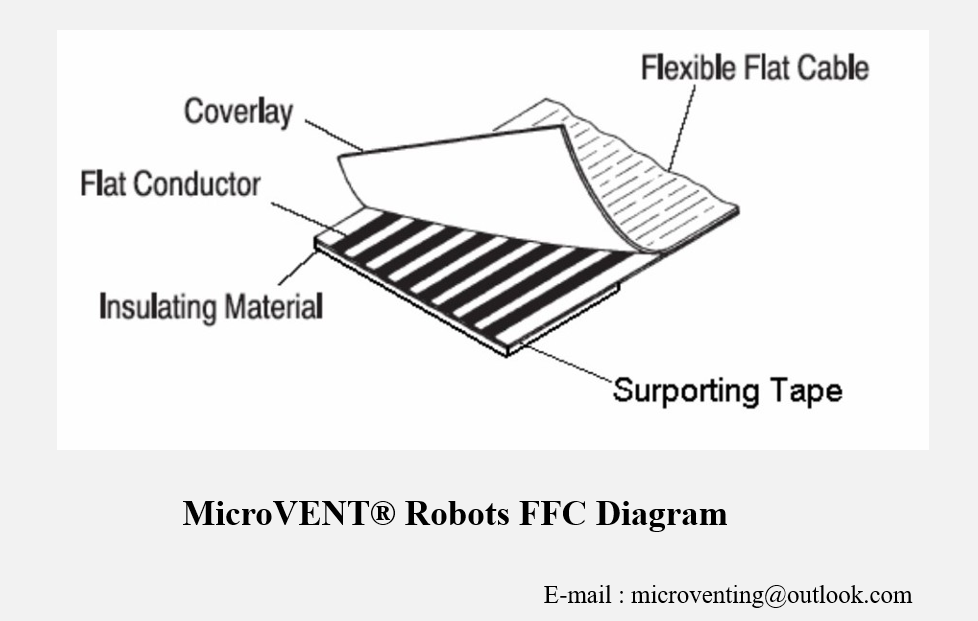
Robots FFC (cable plano flexible)
Descripción
El nuevo cable plano flexible (FFC, por sus siglas en inglés) desarrollado por Pan Asian MicroVENT («MicroVENT®») para robots ha ofrecido un rendimiento sobresaliente en rigurosas pruebas realizadas por los clientes. Los productos superaron con éxito la certificación de resistencia a la flexión con un resultado impresionante de 10 000 000 ciclos de doblado sin fallos , lo que proporciona una solución de conexión más estable para escenarios de movimiento de alta frecuencia en equipos como robots industriales, robots humanoides y manos inteligentes.
Los cables planos flexibles (FFC) constituyen componentes de transmisión fundamentales en los robots, y su resistencia a la flexión determina directamente la eficiencia de funcionamiento continuo y la vida útil del equipo. Esta prueba simuló condiciones reales de trabajo, incluidos el balanceo de alta frecuencia, el arrastre y la torsión de las articulaciones del robot. En entornos con carga nominal y temperatura y humedad constantes, se monitorearon durante todo el proceso indicadores clave como la continuidad de los conductores y la integridad del aislamiento de los cables. Tras una prueba ininterrumpida, los cables no presentaron problemas tales como rotura de conductores, cortocircuitos ni fisuración del aislamiento, y todos los parámetros de rendimiento eléctrico permanecieron estables.
Los cables de nueva concepción adoptan una estructura de conductor altamente flexible y resistente a la fatiga, combinada con materiales especiales de aislamiento elástico y fundas resistentes al desgaste, lo que mejora notablemente la resistencia de los cables a la flexión, tracción y torsión. Asimismo, incorporan un diseño de apantallamiento antinterferencias para garantizar una transmisión de señales estable y precisa, lo que hace que estos cables sean ampliamente aplicables en equipos robóticos utilizados en campos como la automatización industrial, la fabricación inteligente y la logística y almacenamiento.

